dis145
Clase-09 (02/05/2024)
Caminos Abandonados
- El primer proyecto que pensé era una máquina que tatúe siguiendo una línea hecha por un lápiz en la piel, para que así se pueda dibujar el diseño con lápiz más fácilmente. Al hablar con el profe me dijo que era una idea un poco difícil de llevar a cabo por temas de factibilidad y costos.
- El segundo proyecto es parecido al primero, era una máquina de tatuar que tatuara de acuerdo con un eje x y un eje y, creando así las líneas. Pero pensando en el eje z se vuelve un poco más difícil ya que no se podría seguir perfectamente algunos lugares de la piel ya que no son uniformes en ese eje.
- El tercer proyecto consistía en una máquina que tensara la piel, agarrándola y tensándola, como con perros de ropa. Al pensar un poco más en el proyecto me di cuenta de que a veces es difícil agarrar la piel en algunos lugares como por ejemplo los muslos.
Codigo Inicial
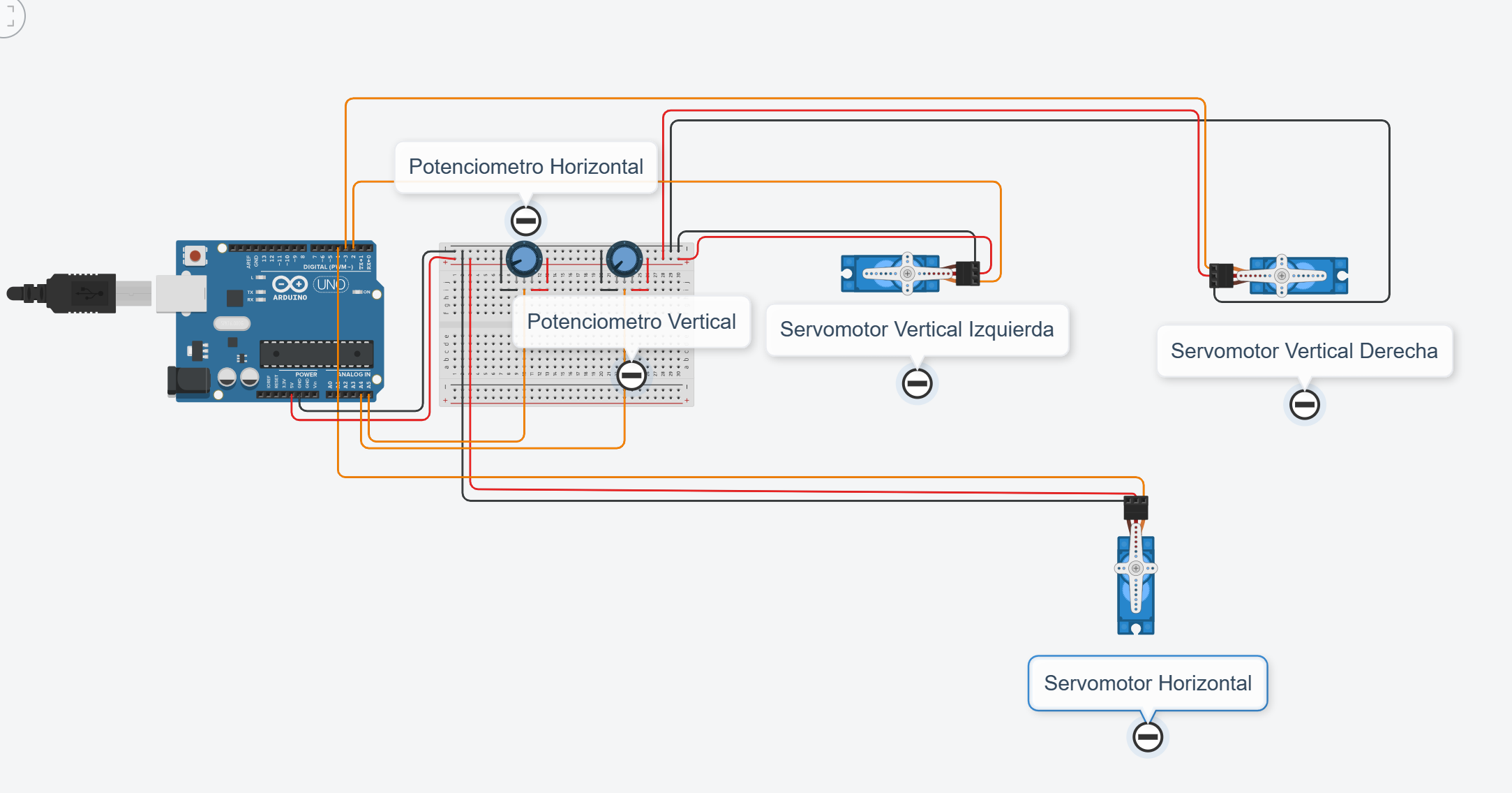
Con el siguiente código logro que a través de un potenciómetro giren dos servomotores de la misma manera, con el fin de que suban o bajen las varas laterales de igual manera, y que con otro potenciómetro gire otro servomotor con el fin de que las varas se cierren o se abran.
#include <Servo.h>
//Agregamos libreria del servomotor
Servo servo_Ver_Izq; //Nombramos el servo vertical izquierdo
Servo servo_Ver_Der; //Nombramos el servo vertical derecho
Servo servo_Hor; //Nombramos el unico servo horizontal
int pot_Ver = A4; //Asignamos pin a potenciometro de la vertical
int pot_Hor = A5; //Asignamos pin a potenciometro de la horizontal
int val_pot_Ver = 0; //Creamos valor inicial del potenciometro vertical
int val_pot_Hor = 0; //Creamos valor inicial del potenciometro horizontal
void setup()
{
pinMode(pot_Ver, INPUT); //Indicamos que el potenciometro vertical es una salida
pinMode(pot_Hor, INPUT); //Indicamos que el potenciometro horizontal es una salida
servo_Ver_Izq.attach(2, 1000, 2500); //Asignamos pin al servo vertical izquierdo
servo_Ver_Der.attach(3, 1000, 2500); //Asignamos pin servo vertical derecho
servo_Hor.attach(4, 1000, 2500); //Asignamos pin al unico servo horizontal
}
void loop()
{
val_pot_Ver = analogRead(pot_Ver); //Actualizamos el valor del potenciometro vertical
val_pot_Hor = analogRead(pot_Hor); //Actualizamos el valor del potenciometro horizontal
servo_Ver_Izq.write(map(val_pot_Ver, 0, 1023, 0, 360)); //Hacemos que el servo vertical izquierdo gire de acuerdo al potenciometro
servo_Ver_Der.write(map(val_pot_Ver, 0, 1023, 0, 360)); //Hacemos que el servo vertical derecho gire de acuerdo al potenciometro
servo_Hor.write(map(val_pot_Hor, 0, 1023, 0, 360)); //Hacemos que el unico servo horizontal gire de acuerdo al potenciometro
delay(10);
}