dis145
Clase-10 (16/05/2024)
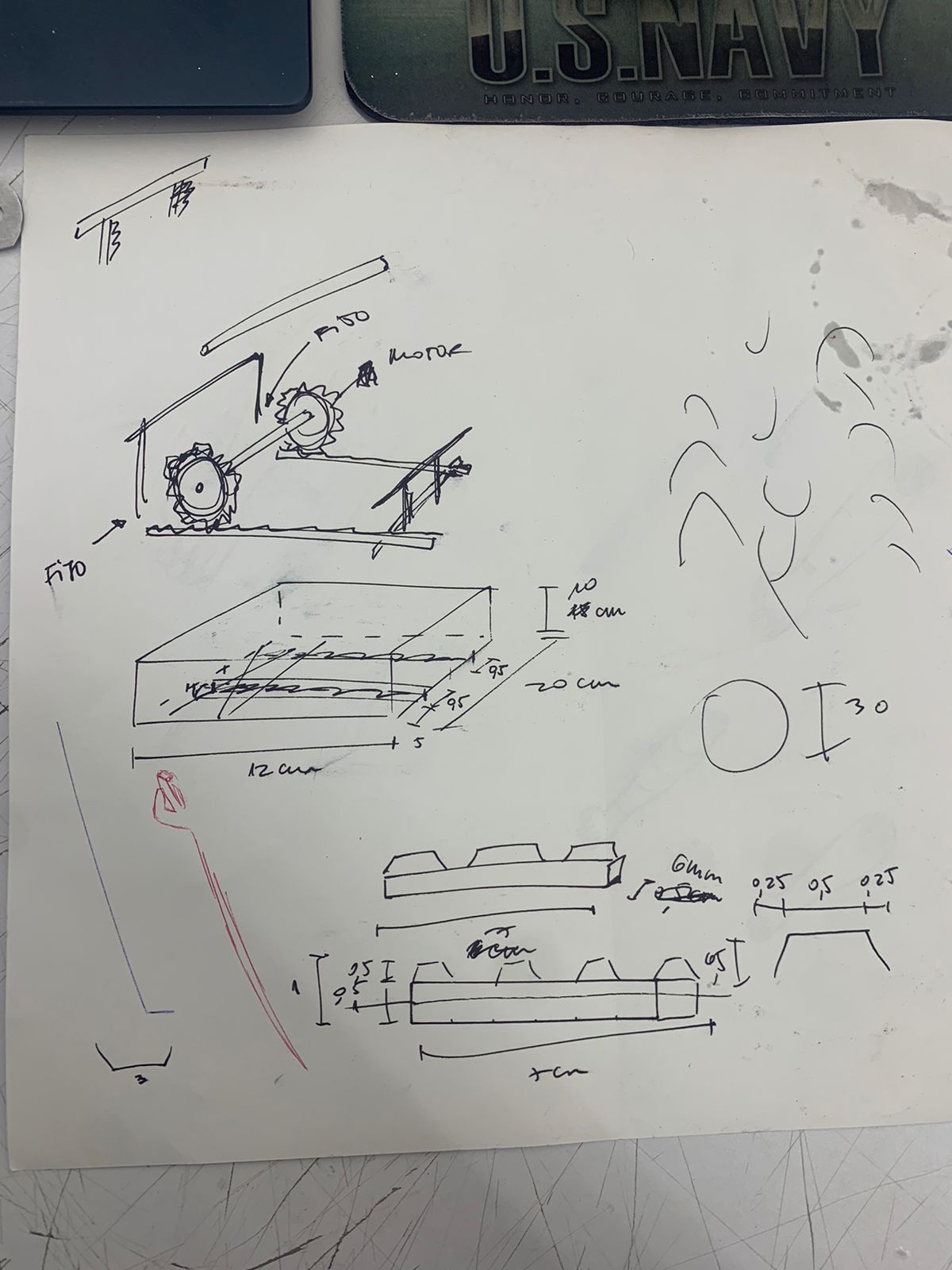
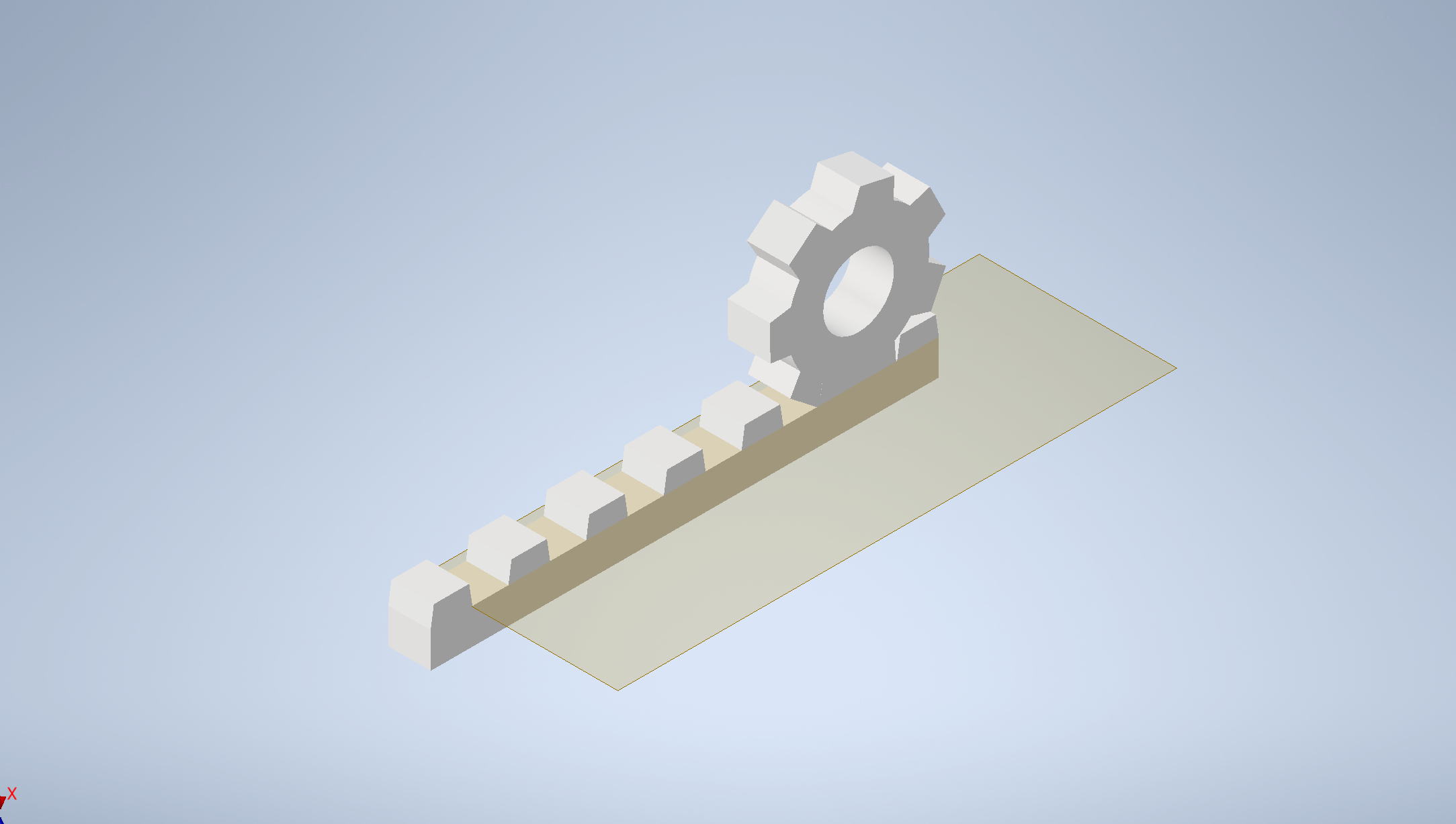
En esta clase, me dedique a probar los mecanismos para mi proyecto en Inventor, pero no me gusto mucho mi resultado ya que no me funciona como me gustaria. Voy a hablar con mi profe de Diseño y Mecanismos para que me ayude a hacerlo y quede como a mi me gustaría, pero hasta ahora este es el avance.
El mecanismo consta de 2 piñones y 2 cremalleras para el movimiento horizontal (impulsado por un servomotor), y de 2 piñones y 2 cremalleras para el movimiento vertical (tambien impulsado por un servomotor). Aca se muestra como seria un piñon con una cremallera y los dibujos que hice para poder modelarlo de la mejor manera.
Corrección Estilo Código
En esta clase tambien me encargue de arregalar el estilo de mi código, deje los comentarios arriba de cada linea del código, y corregí los nombres de las variables eliminando el guion bajo,y aplique metodo camello
//Codigo creado por Martin Gonzalez Marin
//16/05/2024
//Codigo que activa servomotores en funcion de potencionetros con el fin de tensar la piel
//Agregamos libreria del servomotor
#include <Servo.h>
//Nombramos el servo vertical izquierdo
Servo servoVerIzq;
//Nombramos el servo vertical derecho
Servo servoVerDer;
//Nombramos el unico servo horizontal
Servo servoHor;
//Asignamos pin a potenciometro de la vertical
int potVer = A4;
//Asignamos pin a potenciometro de la horizontal
int potHor = A5;
//Creamos valor inicial del potenciometro vertical
int valPotVer = 0;
//Creamos valor inicial del potenciometro horizontal
int valPotHor = 0;
void setup()
{
//Indicamos que el potenciometro vertical es una salida
pinMode(potVer, INPUT);
//Indicamos que el potenciometro horizontal es una salida
pinMode(potHor, INPUT);
//Asignamos pin al servo vertical izquierdo
servoVerIzq.attach(2, 1000, 2500);
//Asignamos pin servo vertical derecho
servoVerDer.attach(3, 1000, 2500);
//Asignamos pin al unico servo horizontal
servoHor.attach(4, 1000, 2500);
}
void loop()
{
//Actualizamos el valor del potenciometro vertical
valPotVer = analogRead(potVer);
//Actualizamos el valor del potenciometro horizontal
valPotHor = analogRead(potHor);
//Hacemos que el servo vertical izquierdo gire de acuerdo al potenciometro
servoVerIzq.write(map(valPotVer, 0, 1023, 0, 360));
//Hacemos que el servo vertical derecho gire de acuerdo al potenciometro
servoVerDer.write(map(valPotVer, 0, 1023, 0, 360));
//Hacemos que el unico servo horizontal gire de acuerdo al potenciometro
servoHor.write(map(valPotHor, 0, 1023, 0, 360));
delay(10);
}